
TM 5-818-1 / AFM 88-3, Chap. 7
modes of vibration, it is represented by the mass
the rigid circular footing resting on the surface of an
moment of inertia about the axis of rotation. For torsional
elastic semi-infinite body for each of the modes of
oscillation about the vertical axis, it is designated as Ιθ;
vibration. Introduce these quantities into equations given
whereas for rocking oscillation, it is Ιψ, (for rotation about
in paragraph 17-2 to compute resonant frequencies and
amplitudes of dynamic motions. The dimensionless
the axis through a diameter of the base of the
frequency, ao, for all modes of vibration is given as
foundation). If the foundation is considered to be a right
follows:
circular cylinder of radius ro, height h, and unit weight y,
expressions for the mass and mass moments of inertia
2πforo
p
(17-9)
are as follow:
= ωro
ao = Vs
G
π
2
ro h
y
The shear velocity, Vs, in the soil is discussed in
m= g
(17-6)
paragraph 17-5.
π ro h y
(3) Figure 17-4 shows the variation of the
4
damping ratio, D, with the mass ratio, B, for the four
Is = 2g
(17-7)
modes of vibration. Note that D is significantly lower for
the rocking mode than for the vertical or horizontal
πro hy
(
)
2
2
2
r0 +
h
(17-8)
translational modes. Using the expression M = 1/(2D)
Ιψ=
g
4
3
for the amplitude magnification factor and the
appropriate D, from figure 17-4, it is obvious that M, can
(2) Theoretical solutions describe the
become large. For example, if Bψ = 3, then Dψ = 0.02
motion magnification factors M, or ML, for example, in
and Mψ = 1/(2 x 0.02) = 25.
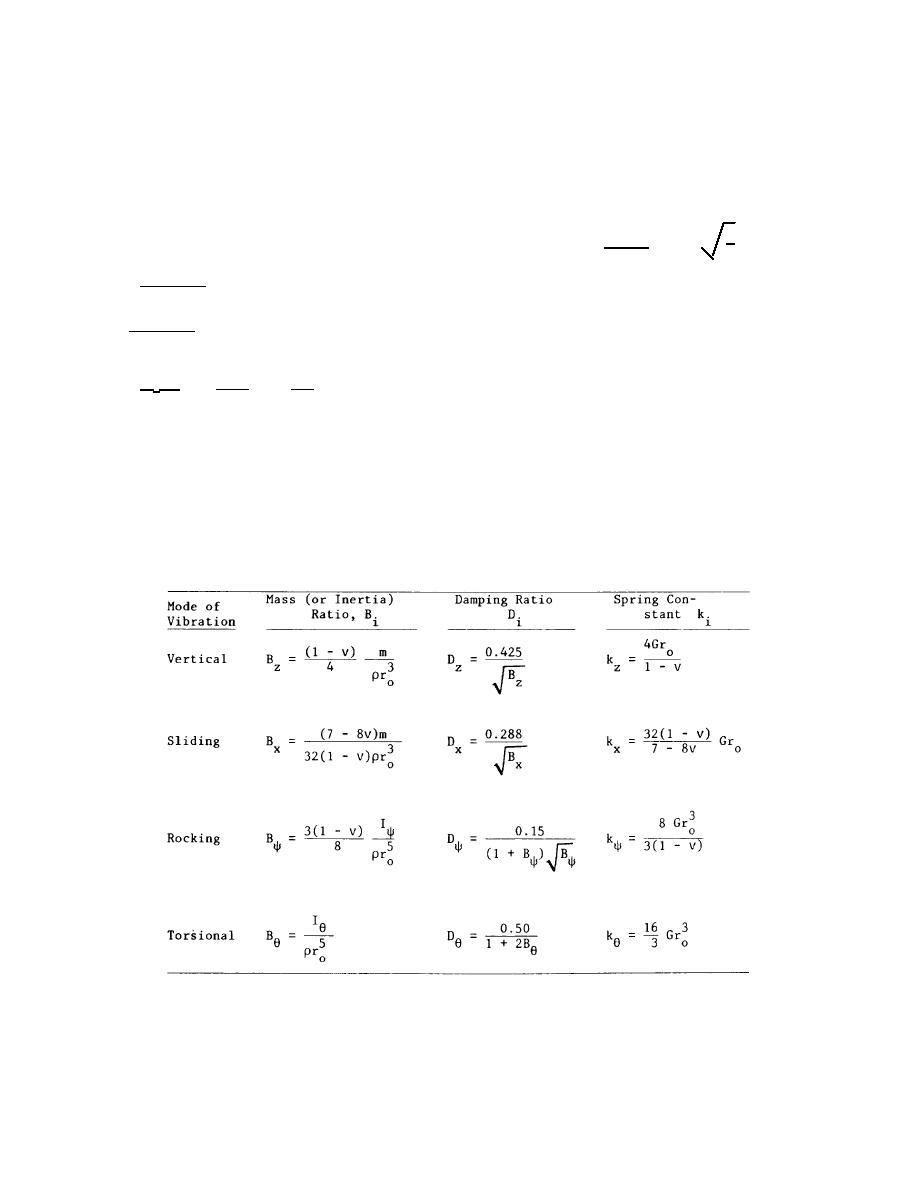
terms of a "mass ratio" Bz and a dimensionless
damping ratios, and spring constants corresponding to
vibrations
of
Table 17-1. Mass ratio, Damping Ration, and Spring Constant for Rigid Circular Footing on the Semi-Infinite Elastic Body
U. S. Army Corps of Engineers
17-4

 Previous Page
Previous Page
